1 A tour of Computer Systems
- 1 A Tour of Computer Systems
1 A Tour of Computer Systems
개요
- 컴퓨터 시스템 = 하드웨어 + 시스템 소프트웨어 → 응용 프로그램 실행
이 책을 통해 배우는 내용
- 컴퓨터가 숫자를 표현하는 방식으로 인해 발생하는 수와 관련된 에러들을 피할 수 있는 실전적 스킬
- 현대 프로세서와 메모리 시스셈 디자인을 활용하는 트릭을 활용하여 C 코드를 어떻게 최적화 할지
- 어떻게 컴파일러가 프로시저 콜을 구현하고 어떻게 그 지식을 활용하여 네트워크와 인터넷 소프트웨어를 괴롭히는 버퍼 오버플로 취약점으로 인한 보안 허점을 피할 수 있는지
- 일반적인 개발자를 난처하게 만드는 linking 동안 발생하는 다루기 어려운 에러를 어떻게 식별하고 피할 것인지
- 어떻게 Unix shell, dynamic storage allocation package, Web server를 작성하는지
- 멀티 코어가 단일 칩에 통합되면서 중요도가 높아지고 있는 동시성(concurrency)의 전망과 위험
- 이를 hello 프로그램의 생애(lifetime)를 통해 알아본다
#include <stdio.h>
int main(){
printf("hello, world\n");
return 0;
}
1.1 정보는 Bits + Context
- hello 프로그램은 개발자가 작성한 hello.c라는 텍스트 파일로 저장된 소스 프로그램(또는 소스 파일)에서 그 생이 시작된다
- 소스 프로그램은
- 비트의 연속이며,
- 각 비트는 0과 1이라는 값을 가지고,
- 이는
bytes라 불리는 8-bits 뭉치를 구성
- 대부분의 컴퓨터 시스템은 텍스트 문자를
ASCII 표준을 사용하여 나타내며, ASCII 표준은 각 문자를고유한 byte 크기의 정수 값으로 나타낸다.
hello.c프로그램 역시 일련의 바이트 파일로 저장hello.c처럼 오직 ASCII 문자로만 구성된 파일을text files라 하며, 그 외에는binary files라고 한다- 즉, 시스템에서 모든 정보는 다수의 bits로 나타난다
- 우리가 정보를 보는 컨텍스트만이 서로 다른 데이터 오브젝트를 구별한다. 예를 들어, 같은 일련의 bytes라도 서로 다른 컨텍스트에서 정수, 실수, 문자열 또는 기계 명령(machine intruction)을 타나낸다
1.2 프로그램은 다른 프로그램에 의해 다른 형식으로 번역된다
- 기계가 C 프로그램 읽기 위해서는
- 반드시 일련의 저레벨 machine-language(기계어) 명령으로 번역되고,
- 명령들은 executable object program(executable object files) 이라 불리는 형식으로 패키징 되고
- 바이너리 디스크 파일로 저장된다
- Unix 시스템에서, 소스 파일에서 오브젝트 파일로의 번역은 compiler driver에 의해 수행된다
-
$ gcc -o hello hello.c실행- hello.c 소스 프로그램(텍스트)
- 전처리(Pre-processor, cpp): 수정된 소스 프로그램(텍스트) 생성
#으로 시작하는 지시(directives)에 따라 원본 C 프로그램을 수정#include <stdio.h>명령은 전처리로 하여금stdio.h시스템 헤더 파일의 내용을 읽어서- 프로그램 텍스트에 직접 삽입하도록 한다
hello.i: 전처리 결과 새롭게 생성된 C 프로그램
- 컴파일러(cc1): 어셈블리 프로그램(텍스트) 생성
hello.s: cc1 컴파일러가hello.i를 번역하여 생성하는 파일. assembly-language program 포함한다.
main:
subq $8, %rsp
movl $.LC0, %edi
call puts
movl $0, %eax
addq $8, %rsp
ret
- Assembler(as): 재배치 가능한 오브젝트 프로그램(바이너리) 생성
hello.o:main함수에 대한 명령을 인코딩하기 위한 17바이트를 포함하는 바이너리 파일- 어셈블러가
hello.s를 기계어 명령으로 번역하고, - relocatable object program 형식으로 패키징 하여
- 그 결과를 저장한 파일
- 어셈블러가
- Linker(ld): 실행 가능한 오브젝트 프로그램(바이너리) 생성
printf함수는- 모든 C 컴파일러가 제공하는 표준 C 라이브러리의 일부로
printf.o라 불리는 미리 컴파일된 오브젝트 파일에 있으며,- 어떤 식으로든 반드시
hello.o프로그램으로 합쳐져야 한다
- 링커(ld)는 이 합치는 것을 다룬다
hello:- ld의 결과
- 시스템에 의해 메모리로 로드되고 실행될 준비가 된 실행 가능한 오브젝트 파일(executable)
hello.c
-> 전처리 -> # 지시에 따라 수정된 hello.i
-> 컴파일 -> 어셈블리어로 번역된 hello.s
-> 에셈블러 -> 재배치 가능 파일 hello.o
-> Linker -> prinf.o와 hello.o 연결
-> 실행 가능한 hello 파일
1.3 컴파일 시스템 동작 방식을 이해하는 것이 좋다
- 정확하고 효율적인 머신 코드 생성 위해 컴파일 시스템에 의존할 수 있지만,
- 개발자가 어떻게 컴파일 시스템이 작동하는지 알아야 할 몇 가지 중요한 이유가 있다
1.3.1 프로그램 성능 최적화
- C 프로그램에서 좋은 코딩을 하기 위한 결정을 내리기 위해서는, 기계 수준의 코드와 어떻게 컴파일러가 서로 다른 C 문장을 기계 코드로 번역하는지에 대한 기본적인 이해가 필요하다
- 예를 들어,
- 연속된 if-else 구문보다 switch 구문이 언제나 더 효과적인가?
- 함수 모출마다 얼만큼의 오버헤드가 발생하는가?
- while 반복문이 for 반복문보다 더 효율적인가?
- 포인터 참조가 배열 인덱스보다 효율적인가?
- 왜 반복문은 참조로 전달(passed by reference)되는 인자 대신 지역 변수로 통합(sum into)했을 때 훨씬 빠른가? (TODO 지역 변수로 통합이란?)
- 산술 표현식에서 단순히 괄호를 재배열할 때 어떻게 함수 속도가 더 빨리지는가?
1.3.2 link-time 에러 이해
- 경험상, 대부분의 복잡한(perplexing) 개발 에러는 linker 작업과 관련이 있다
- 예를 들어,
- 링커가 참조를 확인할 수 없다(cannot resolve a reference)는 보고는 무슨 의미인가?
- 정적 변수와 전역 변수의 차이점은 무엇인가?
- 서로 다른 C 파일에서 같은 이름으로 두 전역 변수를 선언하면 어떻게 되는가?
- 정적 라이브러리와 동적 라이브러리의 차이는 무엇인가?
- 명령 줄(command line)에서 어떤 순서로 라이브러리를 나열하는 것이 무슨 상관일까?
- 무엇보다 가장 두려운 것은, 왜 링커 관련된 에러는 런타임 때까지 나타나지 않을까?
1.3.3 보안상의 구멍 피하기
- 수년 동안 buffer overflow 취약점은 네트워크와 인터넷 서버에서 보안 허점의 많은 부분을 차지했다
- 이러한 취약점은 신뢰할 수 없는 출처로부터 수신하는 데이터의 양(quantity)과 형태(form)를 신중하게 제한할 필요성을 극히 적은 개발자들만 이해했기 때문에 존재한다
- 안전한 프로그래밍을 배우는 첫번째 단계는 데이터와 제어 정보가 프로그램 스택에 저장되는 방식의 결과를 이해하는 것
1.4 메모리에 저장된 명령들을 읽고 해석하는 프로세서
- 실행 가능한 오브젝트 파일
hello가 저장된 후, shell 애플리케이션 프로그램에 이름을 입력하여 실행 - shell은 명령 줄(command-line) 해석기로, 내장 쉘 명령어 아닌 단어 입력하면, 해당 단어가 실행 가능한 파일의 이름으로 간주
- shell은
hello프로그램을 로드하고 실행 후 종료될 때까지 기다린다
1.4.1 시스템의 하드웨어 구성
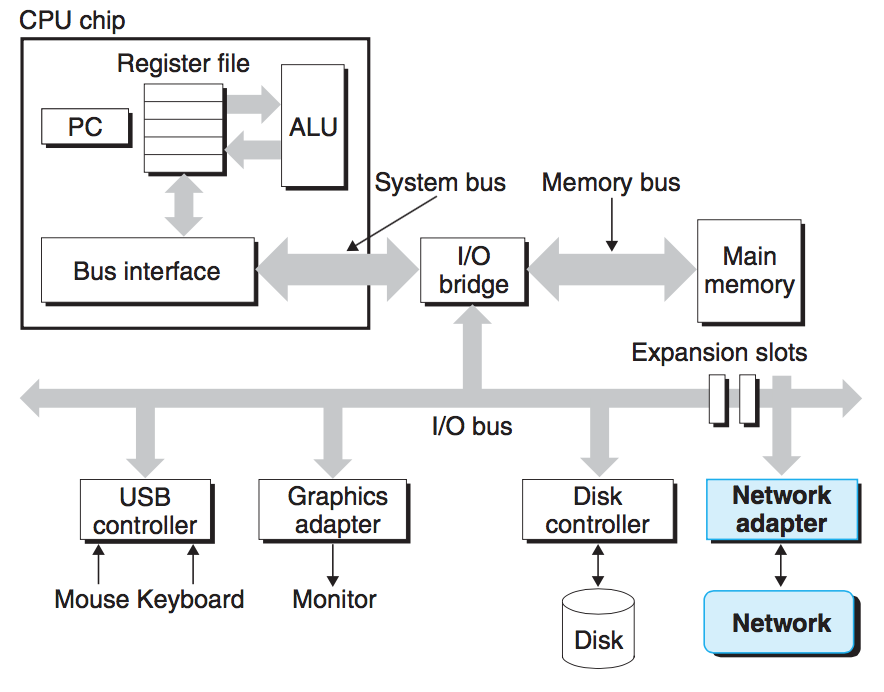
Buses
- 컴포넌트 간에 정보의 바이트를 주고 받는 buses라 불리는 전자적 파이프의 집합이 시스템 전체에 걸쳐 실행된다
- Bus는
words라는 고정된 크기의 바이트를 전송하도록 설계되어 있으며, 오늘날에는 보통- 4 bytes = 32 bits
- 8 bytes = 64 bits
I/O 장치
- Input/Output 장치
- 키보드 또는 마우스
- 디스플레이
- 디스크 드라이브
- 각 I/O 장치는 controller 또는 adapter 로 I/O 버스에 연결되어 있으며, I/O 버스와 I/O 장치 간에 정보를 주고 받기 위한 목적으로 사용된다
- Controller: 장지 자체의 칩셋 또는
motherboard라 불리는 시스템의 주 인쇄 회로 기판(main printed circuit board) - Adapter: 마더보드의 슬롯에 플러그인 되는 카드
- Controller: 장지 자체의 칩셋 또는
Main Memory
- 주기억장치는 프로그램과 프로세서가 프로그램을 실행 중인 동안 제어하는 데이터를 유지하는 임시 저장 장치
- 물리적으로 DRAM(dynamic random access memory) 집합으로 구성
- 논리적으로,
- 0부터 시작하는
- 각각 고유한 주소(배열 인덱스)를 가지는 바이트의
- 선형 배열
- 프로그램 구성하는 기계 명령들은 가변적인 개수의 바이트로 구성
- 데이터 항목의 크기는 C 프로그램 변수 타입에 따라 다양하다
- 리눅스 실행중인 x86-64 머신에서,
- short 타입은 2 bytes 필요
- int 및 float 타입은 4 bytes 필요
- long 및 double 타입은 8 bytes 필요
- 리눅스 실행중인 x86-64 머신에서,
Processor
- 중앙 처리 장치(Central Processing Unit)라 하며, 주기억장치에 저장된 명령을 해석하거나 실행하는 엔진
- 핵임은 program counter(PC)라 불리는 word 크기의 저장 장치(또는 register)
- 프로세서는 전원이 들어온 후부터 꺼질 때까지,
- 프로그램 카운터가 가리키는 명령을 실행하고
- 프로그램 카운터가 다음 명령을 가리키도록 업데이트
- 프로세서는
instruction set architecture에 의해 정의된 매우 간단한 명령 실행 모델에 따라 작동하는 것으로 보인다 - 명령은 엄격한 순서로 실행되고, 한 명령의 실행은 여러 단계를 거친다
- PC가 메모리에서 가리키는 명령을 읽는다
- 읽은 명령의 bits를 해석한다
- 명령이 지시하는 작업을 수행한다
- PC를 다음 명령을 가리키도록 업데이트한다(앞서 실행된 명령에 연속될 수도 있고 아닐 수도 있다)
- 이런 간단한 작업은 몇 안 되며, 주기억장치, register file, 그리고 arithmetic/logic unir(ALU)을 돈다
- register file: word 크기의 레지스터 집합으로 구성된 작은 저장 장치
- ALU: 새로운 데이터와 주소 값들을 계산
- CPU가 명령의 요청을 처리하는 간단한 예제
- Load: 주기억장치의 바이트 또는 word → 레지스터로 복사하여 이전 내용 덮어쓴다
- Store: 레지스터의 바이트 또는 word → 주기억장치의 어떤 위치에 복사하여 해당 위치의 이전 내용 덮어쓴다
- Operate: 두 레지스터의 내용 → ALU로 복사
- 두 word에 대한 산술 연산 수행
- 결과를 레지스터에 저장하여 이전 내용 덮어쓴다
- Jump: 명령 자체에서 추출한 word → PC로 복사하여 이전 내용 덮어쓴다
- 오늘날에는 실행 속도 높이기 위해 훨씬 복잡한 매커니즘 사용하므로, 명령어 집합 구조와 microarchitecture 구별
- 명령어 집합 구조(instruction set architecture): 각 기계 코드 명령어의 영향 설명
- microarchitecture: 프로세서가 실제로 어떻게 구현됐는지 설명
1.4.2 hello 프로그램 실행하기
- 쉘 프로그램은 사용자의 명령어 입력을 대기
./hello명령어 입력- 쉘 프로그램은
.,/,h,e등을 각각 읽어서 레지스터에 기입하고 주기억장치에 저장 - enter 입력함으로써 쉘 프로그램은 명령어 입력이 끝났음을 감지
- 쉘 프로그램은 direct memory access(DMA) 기술 사용하여 프로세서를 거치지 않고 디스크의 데이터를 직접 주기억장치로 전달
- 인련의 명령어를 실행하여 디스크의
hello오브젝트 파일의 코드와hello, world\n문자열 포함하는 데이터 → 주기적장치로 복사 - 실행 가능한
hello파일 로드
- 인련의 명령어를 실행하여 디스크의
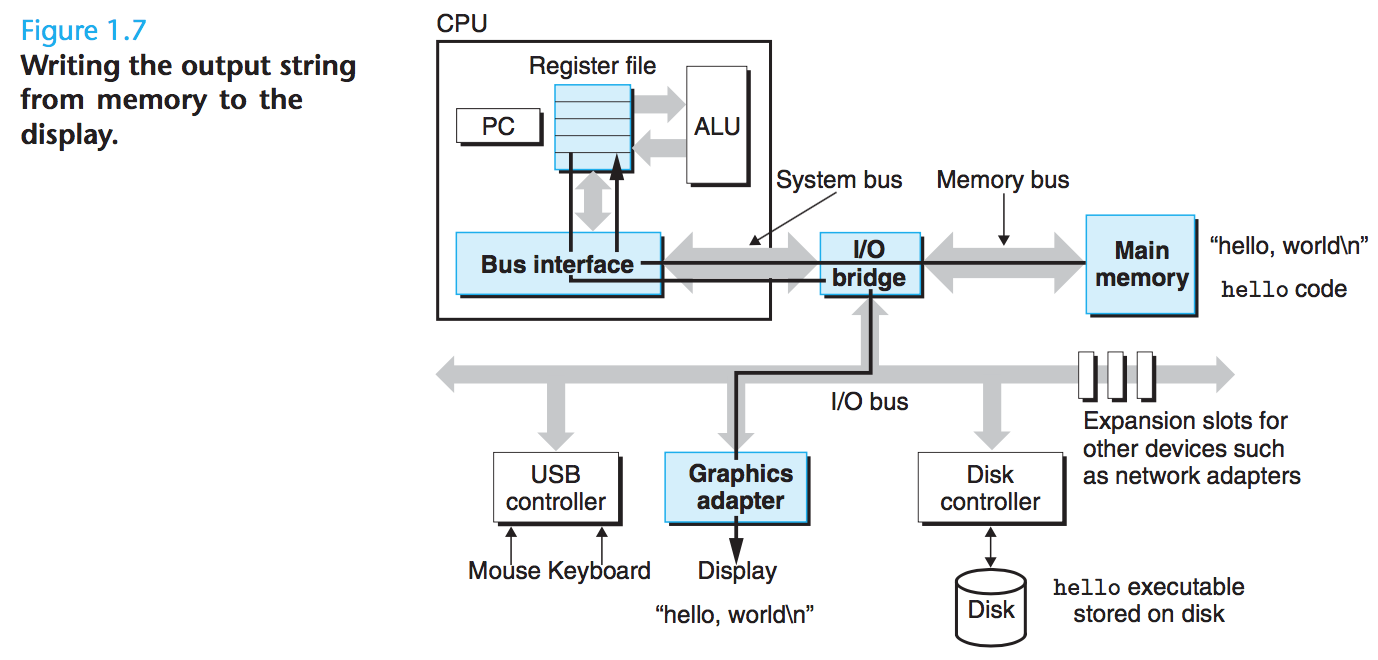
hello오브젝트 파일의 코드와 데이터가 주기억장치에 로드되면- 프로세서가
hello프로그램의main루틴(routine)의 기계어 명령어들을 실행 - 기계어 명령어들은 주기억장치의
hello, world\n문자열 bytes → register file 로 복사 → 디스플레이 장치로 복사
- 프로세서가
1.5 Cache Matter
- 개발자 관점에서 실제 작업을 느리게 하는 너무 많은 복사 오버헤드가 있기에, 시스템 설계자의 주된 목표는 이러한 복사 작업을 가능한 한 빠르게 실행되도록 만드는 것
- 프로그램 로드 시 주기억장치로 복사
- 프로세서가 프로그램 실행 시 명령어 복사
- 주기억 장치로 복사하고 주기억장치에서 디스플레이로 복사
- 큰 저장 장치는 작은 저장장치보다 느리다. 가령 각 장치에 대한 프로세서의 읽기 속도는 대략:
- 1 register 읽기 속도 = $\frac{1}{100}$ 메모리 읽기 속도 = $\frac{1}{1,000,000,000}$ 디스크 읽기 속도
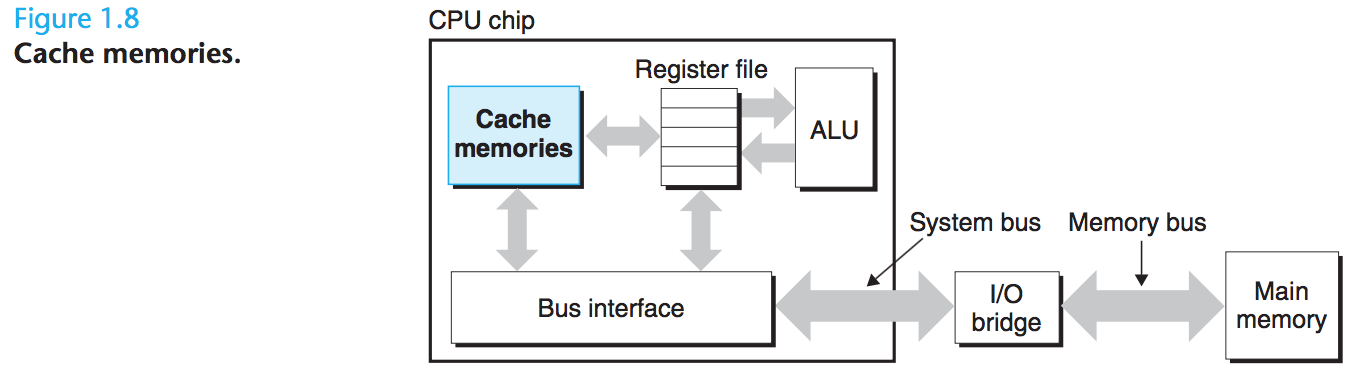
- 이러한 processor-memory 차이가 커지면서, 시스템 설계자는 프로세서가 가까운 미래에 필요로 할 것 같은 정보를 잠시 스테이징(staging)하는 데 사용할 cache memories라는 더 작고 더 빠른 저장 장치를 포함시켰다
- L1 cache: 수만 바이트를 유지하면서 레지스터 파일만큼 빠르게 접근할 수 있다
- L2 cache: 수십만에서 수백만 바이트를 유지하면서 프로세서와 특별한 bus로 연결되어 있다
- 프로세서 접근 속도: L1 Cache = $\frac{1}{5}$ L2 Cache = $\frac{1}{25\text{\textasciitilde}50}$ 메모리 읽기 속도
1.6 계층 구조 형성하는 저장 장치
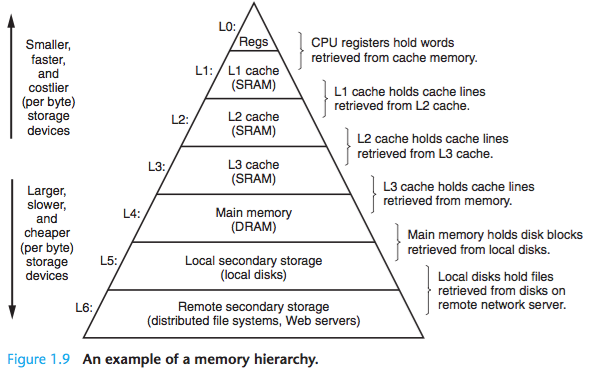
- 메모리 계층 구조의 메인 아이디어는 한 단계의 저장소는 다음 하위 레벨의 캐시 역할한다는 것
1.7 OS는 하드웨어를 관리한다

- operating system은 애플리케이션 프로그램과 하드웨어 사이에 위치한 레이어(layer)로 볼 수 있으며, 하드웨어를 제어하려는 응용 프로그램의 모든 시도는 반드시 OS를 거쳐야 한다
- OS는 두 가지 주요 목적을 갖는데
- runaway 응용 프로그램에 의한 하드웨어 오용 방지
- 복잡하고 종종 완전히 다른 하드웨어 장치를 제어하기 위한 간단하고 균일한 매커니즘을 응용 프로그램에 제공
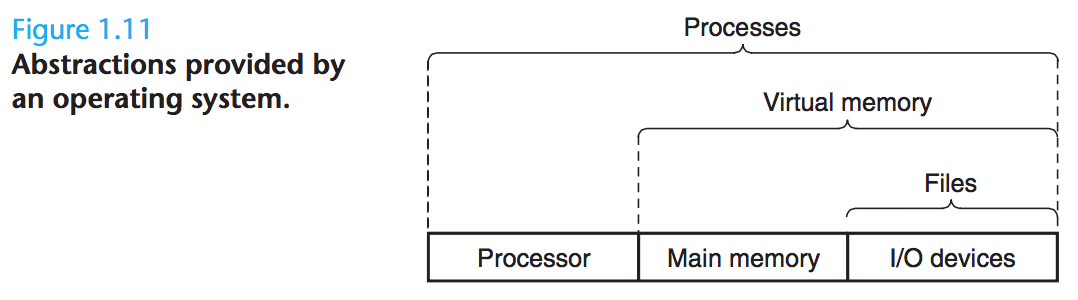
- OS는 이를 process, virtual memory, files 이라는 기초적인 추상화(fundamental abstraction) 통해 목표를 달성한다
- file: ‘I/O 장치’의 추상화
- virtual memory: ‘주기억장치 + I/O 장치’의 추상화
- process: ‘프로세서 + 주기억장치 + I/O 장치’의 추상화
1.7.1 프로세스
- 요즘 같은 시스템에서
hello프로그램 실행 시, OS는 해당 프로그램이 시스템에서 유일하게 실행되고 있는 것처럼 보여주며, 이는 컴퓨터 공학에서 가장 중요하고도 성공적인 아이디어들 중 하나인 프로세스 개념(notion) 덕분 - 프로세스 = 실행중인 프로그램에 대한 OS의 추상화
- 여러 프로세스가 같은 시스템에서 동시에(concurrently) 실행되고, 각 프로세스가 하드웨어를 배타적으로 사용하는 것처럼 보이지만, 여기서 동시에(concurrently)는 한 프로세스의 명령어들이 다른 프로세스의 명령어들 사이에 섞일 수 있다는 것(interleaved)을 의미한다
- 단일 코어든 멀티 코어든 다중 프로세스 실행이 가능한데, 이는 context switching 메커니즘 덕분이다
a. context
- OS가 추적하는 프로세스가 실행되기 위한 모든 상태 정보(all the state information)
- PC(Program Counter)의 현재 값들
- 레지스터 파일의 현재 값들
- 주기억장치의 현재 값들
b. context switching 방식
- 현재 프로세스의 컨텍스트 저장
- 새로운 프로세스의 컨텍스트 복원
- 새로운 프로세스에 제어 전달
c. hello와 shell 예제
- 초기에 쉘 프로세스 단독 실행
hello프로그램 실행 요청- 쉘은 제어를 OS로 넘기는
system call라는 특별한 함수 호출하여 요청 처리 - 제어권을 가진 OS는
- 쉘의 컨텍스트 저장하고
- 새로운
hello프로세스와 컨텍스트를 생성하고 - 제어를 새로운
hello프로세스에 넘긴다
hello프로세스 종료 후, OS는 쉘 프로세스의 컨텍스트를 복원하고 다시 제어권을 넘긴다- 쉘은 다음 명령 줄 입력을 대기
d. kernel
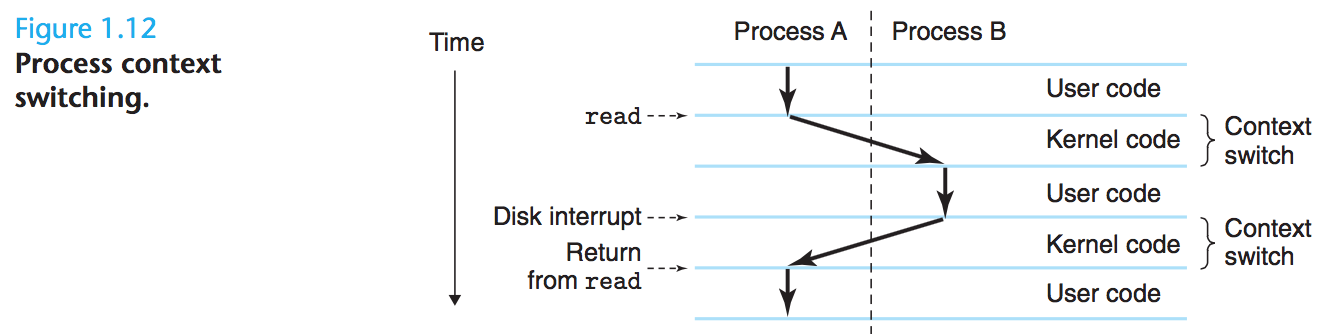
- 위 이미지는
kernel에 의한 프로세스 컨텍스트 전환을 보여준다 - 커널 = 메모리에 상주하는 OS 코드의 일부(TODO 일부러 주기억장치라고 안했는지?)
- 절차
- 응용 프로그램
- → OS 액션 요청(파일 읽고 쓰기 등)
- →
system call명령어 실행 - → 커널로 제어권 넘김
- → 커널이 요청된 작업 수행하고 응용 프로그램으로 반환
- 커널은 별도의 프로세스가 아니며, 시스템이 모든 프로세스를 관리하기 위해 사용하는 코드와 데이터 집합이다
1.7.2 Thread
- 오늘날 프로세스의 프로세스는 다중 실행 단위(unit)
threads로 구성 - 쓰레드는
- 각 프로세스의 컨텍스트 내에서 실행되고
- 같은 코드와 전역(global) 데이터를 공유
- 네트워크 서버에서 동시성을 요구하기 때문에, 다중 프로세스보다 다중 쓰레드 간의 데이터 공유가 더 쉽다는 점에서 점점 더 중요해지고 있는 프로그래밍 모델이다
1.7.3 가상 메모리
- 프로세스 가상 메모리의 내용을 디스크에 저장하고, 주기억장치를 디스크의 캐시로 사용하는 것이 골자
- 프로세스로 하여금 마치 주기억장치를 배타적으로 점유하고 있다고 착각하게 만든다
- 각 프로세스가 각 디스크 영역을 배타적으로 점유하고, 주기억장치를 캐시로 사용하기 때문에 가능
- 각 프로세스는
virtual address space라는 메모리에 대한 똑같은 공통의 관점(view)을 갖는다 - 구성
- 상부(topmost): 모든 프로세스에 공통인 OS의 코드와 데이터를 위해 예약된 주소 공간
- 하부(lower region): 사용자 프로세스에 의해 정의된 코드와 데이터 유지하는 주소 공간
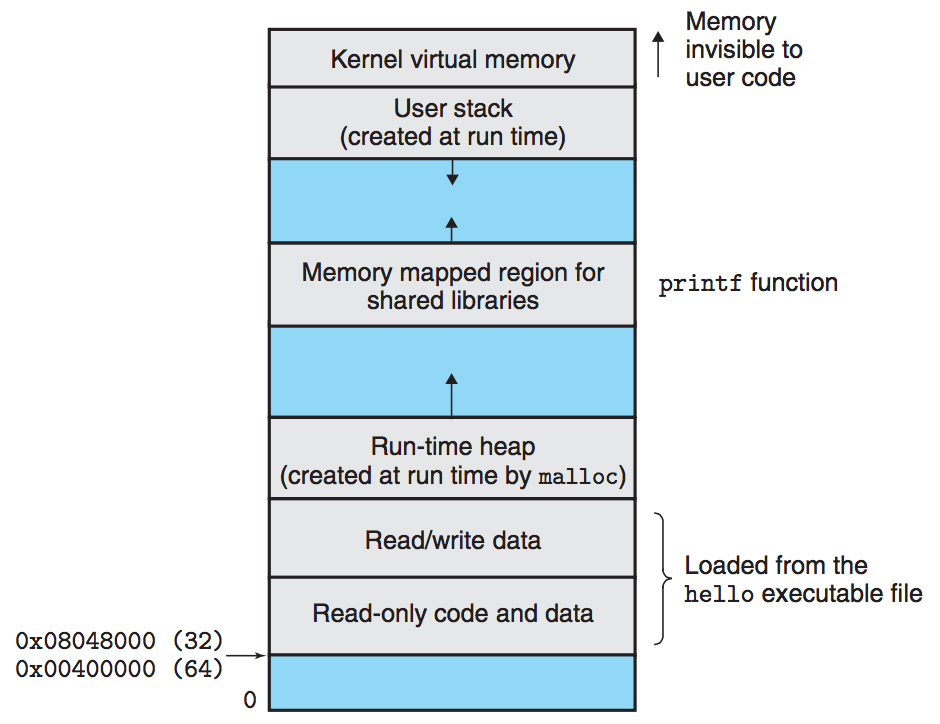
- 각 프로세스에서 보이는 가상 주소 공간은 각자의 목적에 따라 여러 개의 잘 정의된 영역으로 구성
가상 주소 공간의 영역
- 코드 시작(lower) → 전역 C 변수 → 힙 → 공유 라이브러리 → 사용자 스택 → 커널 가상 메모리(topmost)
Program code and data
- 코드는
- 모든 프로세스에서 동일한 고정된 주소에서 시작하며,
- 전역 C 변수(global C variables)에 해당하는 데이터 위치가 뒤따른다
- 그 코드와 데이터 영역은 실행 가능한 오브젝트 파일(
hello)로부터 직접 초기화된다
Heap
- 코드와 데이터 영역 다음에 즉시 런타임 heap 이 따른다
- 코드 및 데이터는 프로세스 시작 시 크기가 고정
- 반면 힙 영역은
malloc과free같은 C 표준 라이브러리 루틴을 호출한 결과에 따라 실행 시에 동적으로 확장/수축한다
Shared libraries
- 가장 주소 공간의 중간쯤에 위치
- C 표준 라이브러와 수작 라이브러리 같은 코드와 데이터에 대한 shared libarries 유지하는 영역
Stack
user stack: 컴파일러가 함수 호출을 구현하기 위해 사용하는 사용자의 가상 주소 공간- heap처럼 프로그램 실행 동안 사용자 스택은 동적으로 확장/축소
- 함수 호출 → 스택 증가
- 함수 리턴 → 스택 감소
Kernel virtual memory
- 가장 주소 공간의 최상단은 커널에 예약
- 응용 프로그램은
- 이 영역의 내용에 대해 읽기/쓰기 불가능
- 커널 코드에 정의된 함수 직접 호출 불가능
1.7.4 파일
- 일련의 바이트
- 디스크, 키보드, 디스플레이, 심지어 네트워크까지 모든 I/O 장치는 파일로 만들어지며(modeled), 시스템의 모든 입출력은 Unix I/O라는 작은 시스템 호출 집합을 사용하여 파일을 읽고 쓰는 것으로 이뤄진다
- 다양한 입출력에 대해 공통된 관점을 제공함으로써, 특정 기술을 몰라도 조작할 수 있다
1.8 시스템은 네트워크 사용한 단른 시스템과 통신한다
- 네트워크 역시 입출력 장치 중 하나
- 시스템 → 주기억장치에서 일련의 바이트를 복사 → 네트워크 어댑터 → 네트워크 → 다른 머신
1.8.1 네트워크 통한 hello 실행
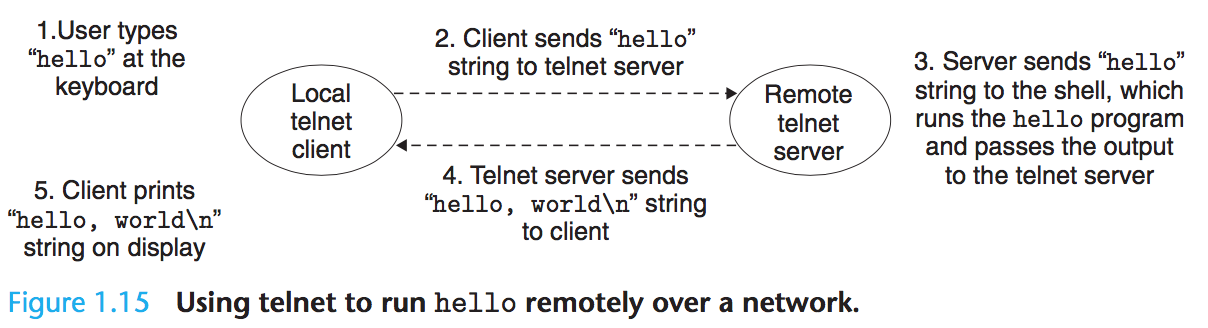
step1
- 로컬 머신의 telnet client 사용하여 telnet server에 연결
- 원격 머신에 로그인하고 shell 실행하면, 원격 쉘은 입력 명령을 대기
- 유저는 telnet client에
hello를 입력하고enter
step2
- telnet client는
hello문자열을 서버로 전송
step3
- 원격 서버는 네트워크로부터 문자열을 받아서 원격 쉘 프로그램으로 전달
- 원격 쉘은
hello프로그램 실행하고 출력을 telnet server로 반환
step4
- telnet server는 네트워크 통해 telnet client로 결과 전송(forward)하고 클라이언트는 결과를 로컬 터미널에 출력
1.9 중요한 테마
- 컴퓨터 역사를 통틀어 두 가지 요소가 개선의 추진력이었다
- 더 빠르게 → 암달의 법칙
- 더 많이 → 동시성과 병행
1.9.1 암달의 법칙
개요
- 시스템 일부의 속도 증가 시, 전체 시스템의 성능은 다음 두 요소에 의존한다
- 그 일부의 중요도
- 속도의 증가 정도
- 시스템의 중요 부분을 충분히 개선한다 해도, 순 속도 향상(net speedup)은 해당 부분의 속도 향상보다 상당히 적다
- 즉, 전체 시스템의 속도를 유의미하게(significantly) 향상시키려면, 반드시 전체 시스템의 매우 큰 부분의 속도를 향상시켜야 한다
수식
$S(=speed up) = T_{old} / T_{new}$
- $T_{old}$가 느리므로 당연히 $T_{new}$보다 시간값이 크다
$T_{new}\newline$ $= (1 - a)T_{old} + (a \times T_{old})/k\newline$ $= T_{old}[(1 - a) + a/k]$
- $T_{old}$: 시스템에서 어떤 응용 프로그램 실행에 필요한 시간
- $a$: 시스템이 필요로 하는 $T_{old}$ 시간의 일부. 중요도를 나타낸다.
- $a\times T_{old}$: 시스템의 일부가 원래 필요로 했던 시간
- $k$: $a$를 k배만큼 증가
- $(1 - a)$: 속도가 증가하지 않는 부분
$S = T_{old}/T_{new} = \frac{1}{(1-a) + a/k}$
- $a/k$: 원래 차지하던 시간 비중$a$가 $k$만큼 분할되므로, 더 빨라짐을 의미
여기서 $k = \infty$로 가정한다면, $a/k$ 부분은 무시할만큼 적은 시작이 되고, $S_{\infin} = \frac{1}{(1-a)}$를 얻을 수 있다. 만약 시스템의 60%를 거의 시간이 필요 없을 정도로 속도를 향상 시킨다면, 순 속도 향상은 1 / 0.4 = 2.5배가 된다
예제
$S = 1 / [(1 - 0.6) + 0.6/3] = \frac{10}{6} = 1.67$
- 시스템의 어떤 일부분에서 기존 $T_{old}$ 시간의 60%를 소모했고($a$ = 60% = 0.6),
- 그 속도가 3배 빨라졌을 때(k = 3)
예제 1.1 트럭 운전사로 Boise, Idaho에서 Minneapolis, Minnesota로 감자를 운반하기 위해 총 2,500 키로미터를 이동한다고 해보자. 평균 100 km/hr로 운전한다고 했을 때, 총 25시간이 소요된다 A. 뉴스에서 막 Montana가 막 속도 제한을 없앴다는 소식을 들었다. Montana 지역은 1,500 km를 차지하는 구간이다. 트럭은 150 km/hr로 이동할 수 있다. 속도 향상(speedup)은 얼마인가?
- 1,500 / 2,500 = 3 / 5 = 0.6 = a
- 150 / 100 = 1.5 = k
- $T_{old}/T_{new} = 1 / [(1 - 0.6) + 0.6/1.5] = 1.25$
B. 새로운 turbocharger를 살 수 있다. 종류가 다양한데, 더 빠른 것은 더 비싸다. 이동의 전체 속도가 1.67배 향상되려면 얼마나 빨리 Montana를 통과해야 하는가?
- $T_{old}/T_{new} = 1 / [(1 - 0.6) + 0.6/k] = 1.67$가 되려면 앞서 본 것처럼 k는 3이 되어야 한다
- $x / 100 = 3$이 되려면 x는 300이 되어야 한다
예제1.2 자동차 제조사는 고객에게 나음 출시되는 새로운 엔진은 4배의 성능 향상을 보여줄 것이라고 고객에게 약속을 했다. 당신은 이 약속을 이행(deliverying on)하는 업무를 맡게 됐다(왓더…). 당신은 엔진의 오직 90%만 개선할 수 있다고 정했다. 엔진의 목표 전체 성능 향상에 달성하려면, 얼만큼 향상시킬 필요가 있는가?(즉 k값은?)
$1 / [(1 - 0.9) + 0.9/k] = 4\newline$ → $0.1 + 0.9/k = 1/4\newline$ → $0.4 + 3.6/k = 1\newline$ → $3.6/k = 0.6\newline$ → $k = 3.6/0.6\newline$ → $k = 6$
1.9.2. 동시성과 병행
동시성(concurrency)
- 여럿이(multiple)
- 동시에(simultaneous)
병행(parallelism)
- 시스템이 더 빨라지도록 동시성을 사용하는 것
- 컴퓨터 시스템의 여러 추상화 단계에서 사용될 수 있다
쓰레드 레벨의 동시성
- 프로세스 추상화 → 동시에 여러 프로그램 실행하는 시스템 가능
- 쓰레드 → 단일 프로세스에서 실행되는 여러 제어 흐름(control flows) 가능
uniprocessor system
- 저글링하는 것처럼, 단일 컴퓨터가 빠르게 프로세스를 스위칭
- 동시 실행되는 것처럼(simulated) 보였지만, 실제로는 동시에 실행되는 건 아니었다
multiprocessor system
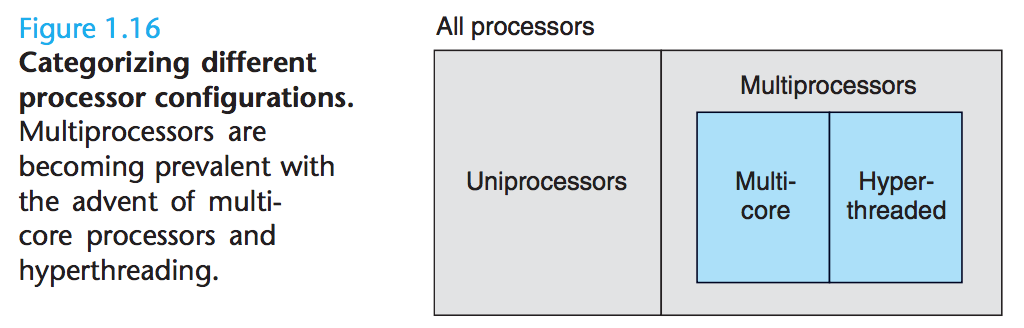
- 모든 멀티 프로세서가 단일 OS 커널의 제어 하에 시스템을 구성.
- 1980년대부터 가능.
multi-core processor
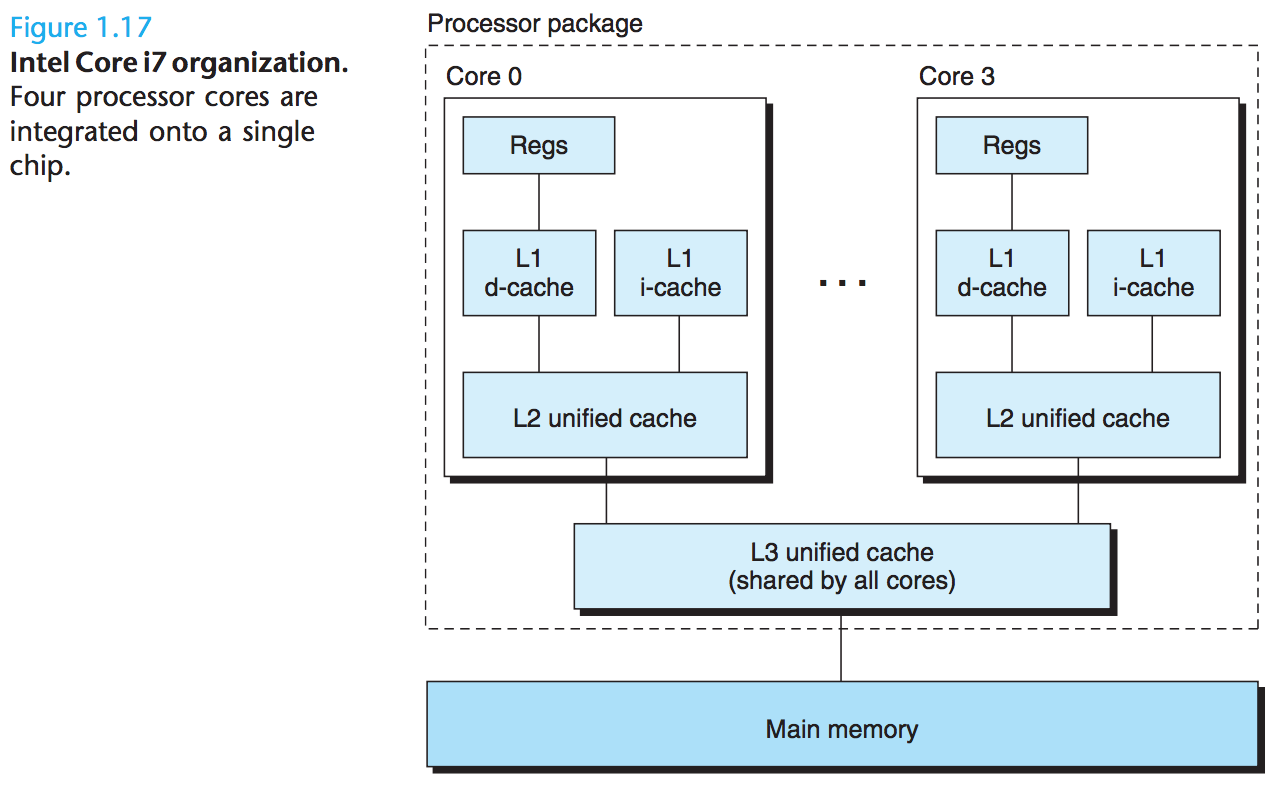
- 각 코어의 구성
- L1
- i-cache: 최근 가져(fetch) 온 명령어들 유지
- d-cache: 최근 가져온 데이터 유지
- L2
- L1
- L3
- 더 높은 레벨의 캐시이자
- 주기억장치에 대한 인터페이스
hyperthreading
- simultaneous multi-threading라고도 불리며, 단일 CPU도 여러 흐름 제어(flows of contro) 실행 가능케 한다
- PC(Program Counter)나 레지스터 파일 등 CPU의 복사본을 갖는 반면, 부동 소수점 산술 연산(floating-point arithmetic) 수행하는 유닛 같은 다른 CPU 부분은 한 개의 복사본을 갖는 경우를 포함한다
- 이전 프로세서와 하이퍼쓰레드 프로세서의 차이?
- 이전 프로세서에서는 쓰레드 간에 이동을 하려면 20,000 clock cycles(주기) 정도 필요
- 하이퍼쓰레드 프로세서는 주기마다(cycle-by-cycle) 어떤 쓰레드를 실행할 것인지를 결정
- 한 쓰레드가 어떤 데이터가 캐시에 로드될 때까지 반드시 기다려야 한다면, CPU는 다른 쓰레드 진행 가능
- 인텔 코어 i7 프로세서는 각 코어가 두 개의 쓰레드 실행 가능하므로, 4개의 코어 시스템은 8개의 쓰레드를 병렬로 실행 가능
- 장점?
- 여러 작업 수행할 때 동시성을 모방(simulate)하는 것을 줄일 수 있다
- 효과적으로 병렬 실행되는 멀티 쓰레드의 측면에서 작성된 단일 응용 프로그램을 더 빠르게 실행할 수 있다
명령어 레벨의 동시성
- 과거에는 단일 명령어당 3 ~ 10 clock cycles 필요했지만, 요즘 프로세서는 clock cycle당 2 ~ 4 명령어 실행률 지속 가능
pipelining
- 어떤 명령어 실행하기 위한 행동들을 여러 단계로 분할
- 프로세서 하드웨어는 일련의 스테이지(a series of stages)로 구성
- 각 스테이지는 분할된 단계를 수행
- 스테이지는 병렬로 수행될 수 있으며, 다양한 명령어들의 다양한 부분에서 이뤄질 수 있다
superscalar processors
주기당 1 명령어 실행보다 빠른 실행률을 지속할 수 있는 프로세서
SIMD(Single-Instruction, Multiple-Data) Parallelism
- 단일 명령어가 병렬로 여러 작업을 일으킬 수 있는 특별한 하드웨어
- 예를 들어 요즘 Intel과 AMD 프로세서는 8 쌍의 단정밀도 부동소수점(single precision floating-point number, C에서 float 타입)을 병렬로 더할 수 있는 명령어를 가지고 있다
- SIMD 명령어는 대부분 이미지, 소리 그리고 영상 데이터를 처리하는 응용 프로그램의 속도를 높이기 위해 제공된다
1.9.3. 컴퓨터 시스템에서 추상화의 중요성
- 추상화(abstration)는 컴퓨터 공학에서 가장 중요한 개념중 하나
- 예를 들어, 좋은 개발 연습의 하나는 개발자가 굳이 내부 로직을 파고들 필요 없이 코드를 사용할 수 있게 하는 함수의 집합인 API(Application Program Interface)를 만들어보는 것
- 서로 다른 개발 언어는 추상화에 대해 다른 형식과 레벨을 제공한다
- java: Class declarations
- C: function prototypes
프로세서의 측면에서
- 프로세서 부분에서, instruction set architecture는 실제 프로세서 하드웨어에 대한 추상화 제공
- 이 추상화 덕분에, 실제 하드웨어는 훨씬 정교하지만,
한번에 한 명령어를 수행하는 어떤 한 프로세서위에서 기계 코드 프로그램이 실행되는 것처럼 동작한다 - 동일한 실행 모델을 유지함으로써, 서로 다르게 구현되어 다양한 비용과 퍼포먼스를 보이는 프로세서들이 같은 기계 코드 실행 가능
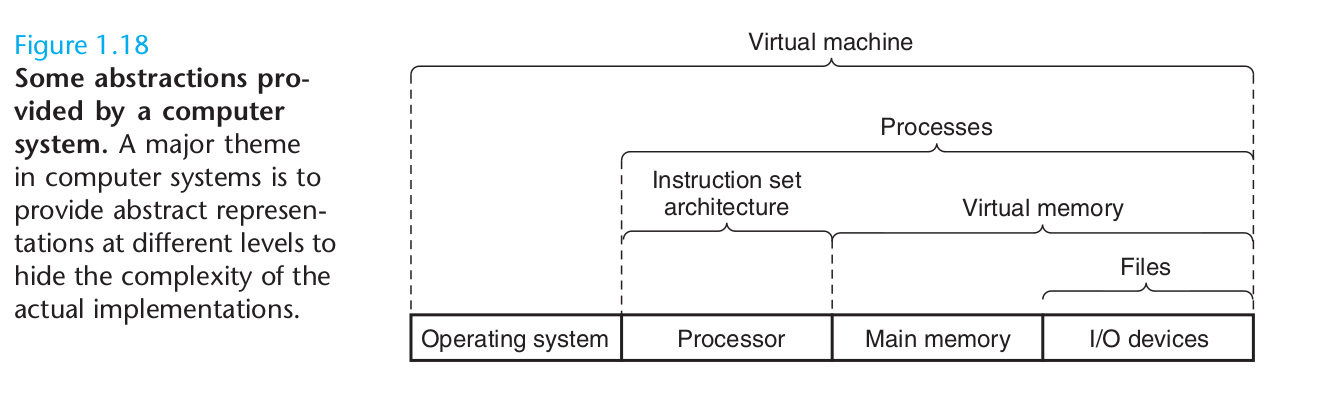
OS의 측면에서
- file: I/O 장치의 추상화
- virtual memory: 프로그램 메모리의 추상화
- prcoess: 실행 프로그램의 추상화
- virtual machine: OS, 프로세서, 프로그램을 포함하는 전체 컴퓨터의 추상화
1.10 요약
- 생략